DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Alexander Khazatsky, Karl Pertsch, Suraj Nair, Ashwin Balakrishna, Sudeep Dasari, Siddharth Karamcheti, Soroush Nasiriany, Mohan Kumar Srirama, Lawrence Yunliang Chen, Kirsty Ellis, and
89 more authors
In Robotics: Science and Systems (RSS), 2024
The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path
toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging:
collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial
investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on
data collected in a small number of environments with limited scene and task diversity. In this work, we introduce
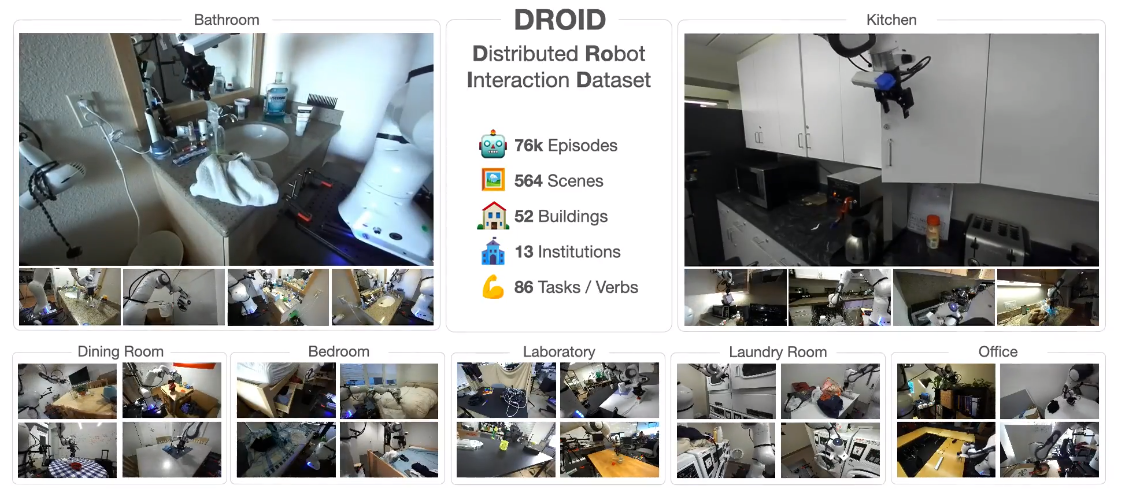
DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or
350h of interaction data, collected across 564 scenes and 86 tasks by 50 data collectors in North America,
Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance,
greater robustness, and improved generalization ability. We open source the full dataset, code for policy training,
and a detailed guide for reproducing our robot hardware setup.